智能 MEMS 麦克风实现高精度声学测距:从 FMCW 到 BeepBeep
由无锡硅源科技有限公司出版。
🔗 智能 MEMS 麦克风产品页面 →
简介:声学测距与智能 MEMS 麦克风的结合
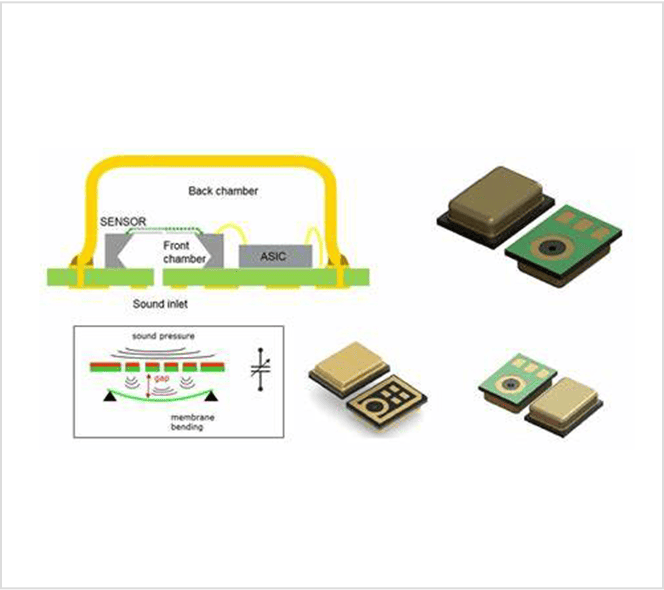
随着智能传感技术的不断发展、 智能 MEMS 麦克风 它们正在超越简单的音频采集 - 它们正在成为 精密测量和定位仪器.
最激动人心的创新领域之一是 声波测距其中,MEMS 麦克风检测声音传播时间,以亚厘米精度计算距离。
在 无锡硅源科技有限公司(SISTC)我们的研究综合了 声信号处理, 微机电系统传感以及 人工智能边缘计算使下一代设备能够执行实时 空间意识 与 运动追踪.
本文介绍了两个具有代表性的 声学测距技术 基于 飞行时间 (ToF):
- FMCW(频率调制连续波)测距
- BeepBeep 双向声学测距

1.FMCW 声学测距:通过频率差实现精度
FMCW(调频连续波) 测距仪通过分析发射声波和反射声波之间的频率偏移来测量距离。
在这种方法中,音源(扬声器)发出频率随时间线性增加的啁啾信号。当声音从表面反射时,接收器(配备 MEMS 麦克风)会同时记录原始信号和反射信号。
通过比较这两个信号,特别是它们的 节拍频率(Δf) - 我们可以计算时间延迟 (td),从而计算距离 (R): R=c⋅Δf⋅TBR = \frac{c \cdot \Delta f \cdot T}{B}R=Bc⋅Δf⋅T
例如:
- c = 音速
- B = 扫频带宽
- T = 扫频周期
越高 频率分辨率 与 信噪比(SNR) MEMS 麦克风的功率越大,结果就越精确。
我们的 智能 MEMS 麦克风 优惠 高信噪比, 低自噪声以及 超快瞬态响应这是在 FMCW 应用中捕捉微妙频率偏移的理想选择。
🔗 了解有关 SISTC 高性能智能 MEMS 麦克风的更多信息:
https://sistc.com/product/smart-mems-microphone/
2.BeepBeep:无时钟同步的双向声学测距
SISTC的 哔哔哔 系统,由 Peng 等人(2007 年)首次提出 [1],推出了一个 简单而巧妙的方法来 测量两个设备之间距离的方法--无需精确的时间同步。


具体操作如下
- 设备 A 在 tA₀,由其本身接收 (tA₁)和 设备 B (tB₁).
- 设备 B 然后在 tB₂,由其本身接收 (tB₃)和 设备 A (tA₃).
- 设备在本地计算发送/接收间隔之间的差值,然后交换定时数据以估算距离。
BeepBeep 的魅力在于它能够 消除硬件时钟漂移因为每个设备只依赖当地时差。
这使得该方法 与商用移动硬件高度兼容尤其是集成了以下功能的智能手机和物联网设备 智能 MEMS 麦克风.
在手机上实现时,这种方法使用相同的 MEMS 麦克风和扬声器来执行以下功能 双向声学通信因此,只需最少的额外硬件就能实现高精度定位。
3.真实世界的应用:智能 MEMS 麦克风的实际应用
的收敛 声学测距 与 微机电系统技术 开辟了新的机遇:
- 室内定位系统 (例如,零售、机器人和 AR/VR 领域)
- 手势识别 通过声反射
- 非接触式控制界面 采用超声波传感技术
- 可穿戴健身设备 通过声反馈跟踪运动
- 智能家居设备 能够实时感知空间
SISTC 的 智能 MEMS 麦克风系列 提供:
- 高灵敏度和宽带宽(高达 20 kHz+)
- 动态声压下的出色线性度
- 边缘人工智能设备的低功耗
- 设计紧凑,非常适合集成到消费电子产品中
💡 探索 SISTC 的 MEMS 麦克风如何改变消费电子、物联网和可穿戴设备的智能传感和空间感知。
🔗 访问智能 MEMS 麦克风产品页面 →
4.未来展望:边缘人工智能 + 微机电系统实现情境感知智能
通过将 边缘人工智能 与 智能 MEMS 麦克风下一代设备可以 领会 与 反应 实时了解周围环境。
无论是检测用户存在的智能扬声器,还是利用声学反馈绘制环境地图的机器人、 MEMS 麦克风正在发展成为智能空间传感器.
微机电系统技术的不断微型化和集成化 机器学习算法 直接在边缘处理器上运行的技术正在为 自主传感系统 能够实时感知上下文。
在 SISTC,我们继续探索 多模态传感器融合结合 MEMS 麦克风, IMU以及 光学传感器 为下一代智能消费设备提供动力。
参考资料
[1] Peng, C., Shen, G., Zhang, Y., Li, Y., & Tan, K. (2007). BeepBeep:使用 COTS 移动设备的高精度声学测距系统。 SenSys 2007 会议记录。
🔗 https://doi.org/10.1145/1322263.1322265