智能 MEMS 麦克风和多模式传感器如何为下一代智能机器人提供动力
发布于 www.sistc.com
导言:从虚拟智能到嵌入式智能
人工智能的发展正在超越仅存在于云端的算法。人工智能的崛起 嵌入式人工智能 标志着一个深刻的范式转变--从虚拟环境中的数据驱动推理到 现实世界中的感知驱动智能.机器人不再仅仅是执行命令,而是 感知、推理和行动 在复杂、动态和非结构化的环境中。
这种变革的核心是一类小到可以放在手指尖上,但却强大到足以感知世界的技术: 微机电系统(MEMS).作为 感觉神经系统 MEMS 传感器将多种感知模式--视觉、声音、触觉、运动甚至嗅觉--集成到小巧、低功耗、高保真的设备中。
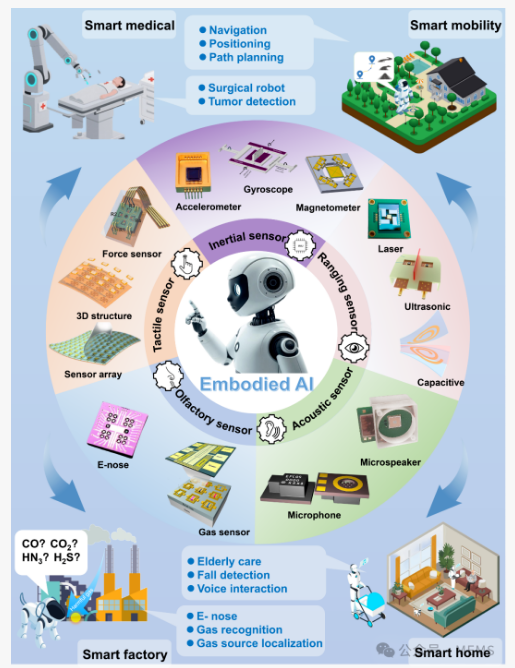
MEMS 传感器:构建机器人技术的感知基础
在传统机器人中,感知能力往往受限于分立传感器的体积和功耗。微机电系统(MEMS)技术改变了这一状况,使 微型化、高集成度和成本效益让机器人获得更丰富、更分散的感知能力。
1.微机电系统测距传感器:看穿距离
通过测量微尺度的机械变形或波形传播,MEMS 量程传感器可提供 高精度距离传感 紧凑型设计。无论是基于激光、超声波还是电容原理,它们都在环境映射、导航和避开目标方面发挥着至关重要的作用,而这正是体现人工智能系统安全和智能移动的基础。
2.微机电系统惯性传感器:运动和平衡
基于 MEMS 惯性测量单元 (IMU) 集成了加速计、陀螺仪和磁力计,可提供精确的实时运动数据。即使没有 GPS,它们也能让机器人保持平衡、估计位置和控制方向。从仿人机器人到自主无人机,MEMS IMU 对于稳定导航和与物理世界的动态交互都是不可或缺的。
3.微机电系统触觉传感器:电子皮肤
MEMS 触觉传感器让机器人能够 感觉 - MEMS 触感设备可检测压力、纹理、摩擦力甚至温度。通过利用压阻、电容或压电效应,MEMS 触觉设备可将机械刺激转化为电信号,使机器人能够进行精细操作,并实现安全的人机协作。
与 柔性电子皮肤 通过这些传感器,可以在机器人表面实现分布式、类似人类的触摸感知。
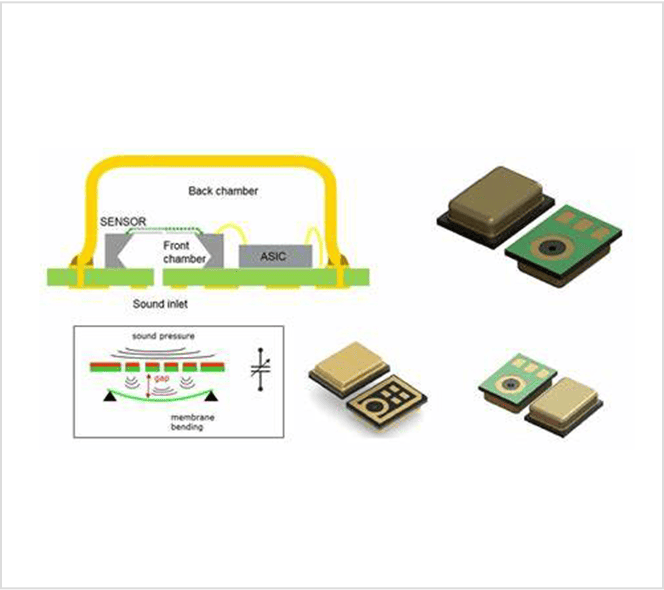
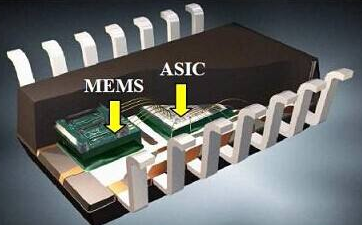
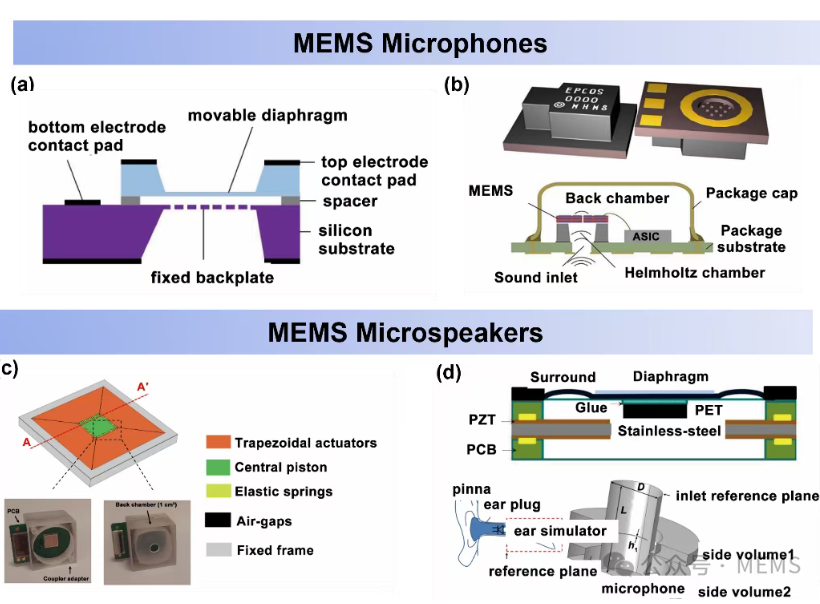
4.微机电系统声学传感器:智能听觉和说话
声音是人机互动的重要渠道。 MEMS 麦克风和扬声器 是机器人 "听觉 "和 "语言 "的关键组成部分。
在 SISTC,我们 智能 MEMS 麦克风 技术实现:
- 高信噪比和低失真 准确捕捉环境和语音声音
- 超低功耗运行 是嵌入式机器人技术中始终在线传感的理想选择
- 外形紧凑 用于机器人和智能设备中的密集阵列配置
这种声学传感器可以让机器人
- 定位声源
- 解读语音命令
- 检测工业环境中的异常情况
- 通过波束成形阵列实现空间感知
(相关阅读 MEMS 麦克风阵列如何提高行人检测精度)
5.MEMS 嗅觉传感器:嗅觉无形
MEMS 嗅觉传感器通常被称为 "电子鼻",可以识别气体成分、检测危险化学品,甚至识别与疾病相关的挥发性有机化合物。对于人工智能机器人来说,这意味着在以下方面具有新的能力 环境监测、灾难应对和工业安全.
智能 MEMS 麦克风:智能机器的声学接口
SISTC的 智能 MEMS 麦克风 SISTC 推出的该系列是向机器人声学意识迈出的重要一步。
通过 高灵敏度、低自噪以及 支持人工智能的模拟/数字接口这些麦克风既是机器人的 "耳朵",也是其实时 "认知反馈回路 "的一部分。
与人工智能语音模型或听觉感知网络集成后,它们能够
- 3D 声音定位 用于态势感知
- 语音活动检测和声源分离
- 对话式人工智能的实时自适应波束成形
这些特性使智能 MEMS 麦克风成为以下应用的理想选择 嵌入式人工智能系统在这种情况下,情境声学智能对自主决策至关重要。
挑战与未来之路
尽管取得了巨大进步,但机器人技术中的微机电系统集成仍面临重大挑战:
- 异构制造:微机电系统传感器依赖于不同的制造技术,使统一生产和扩展变得复杂。
- 机械整合:在小接头或顺从结构中嵌入传感器,需要先进的抗振性和最小的耦合噪声。
未来的创新在于 跨领域整合 - 将微机电系统传感与神经形态计算和内存人工智能架构相结合。这将使微机电系统从被动信号提供者转变为 活跃的边缘智能感知节点实时连接感知和认知。
结论:从感知到理解
微机电系统技术为机器人提供了与人类和世界自然互动所需的 "感觉神经元"。
当与大规模人工智能模型--"认知大脑"--搭配使用时,协同作用可使机器人 视觉、听觉、感觉和思维这标志着真正的智能化时代的到来。
在 SISTC,我们继续推进 智能 MEMS 麦克风 和传感器集成技术,为下一代智能机器(从服务机器人到工业自动化和自主系统)提供支持。
了解更多信息:
🔗 智能 MEMS 麦克风产品页面
🔗 原文载于 智能机器人期刊 威利
🔗 更多信息来自 SISTC 研究博客