Introduction
With rapid urbanization and the increasing density of city traffic, pedestrian safety has become a critical concern. According to the World Health Organization, approximately 1.35 million road accidents occur each year, and nearly 23% of fatalities involve pedestrians.
Traditional sensing technologies such as cameras, radar, and LiDAR often struggle in low-visibility conditions, such as fog, rain, or poor lighting. To address these challenges, researchers from the University of Valencia (Spain) have developed a pedestrian detection system based on a MEMS microphone array, capable of real-time pedestrian recognition on moving vehicles — offering a breakthrough in acoustic-based safety perception.
System Architecture
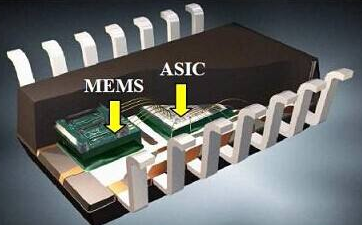
The system integrates Smart MEMS microphones, signal processing, and vehicle control communication modules.
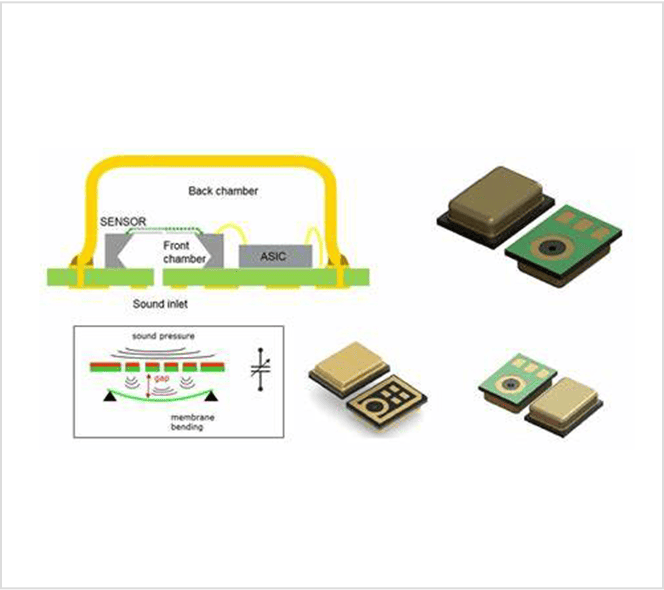
1. Acoustic Sensing
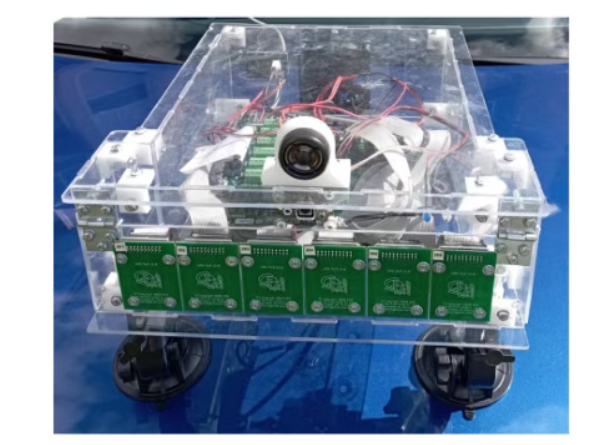
A 5×30 MEMS microphone array (150 microphones in total) with 0.9 cm spacing is mounted at the front of a test vehicle.
These microphones capture sound waves emitted by a high-frequency speaker and reflected from pedestrians — similar to an acoustic radar system.
🔗 Learn more about the technology behind Smart MEMS microphones:
👉 SISTC Smart MEMS Microphone Product Page
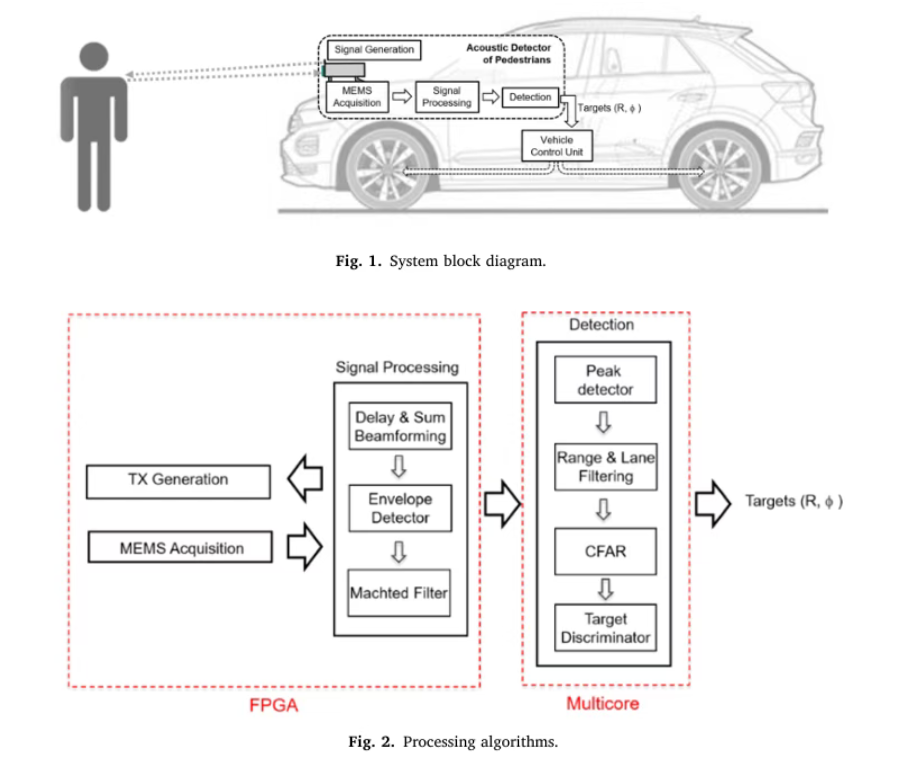
2. Signal Processing
Using an FPGA-based architecture, the system performs:
- Beamforming with a delay-sum algorithm to generate 17 discrete beams covering -24° to +24°.
- Envelope detection to mitigate Doppler effects.
- Matched filtering to enhance signal-to-noise ratio (SNR).
The core algorithm enables precise pedestrian localization even under vehicle motion and environmental noise.
3. Detection and Decision Making
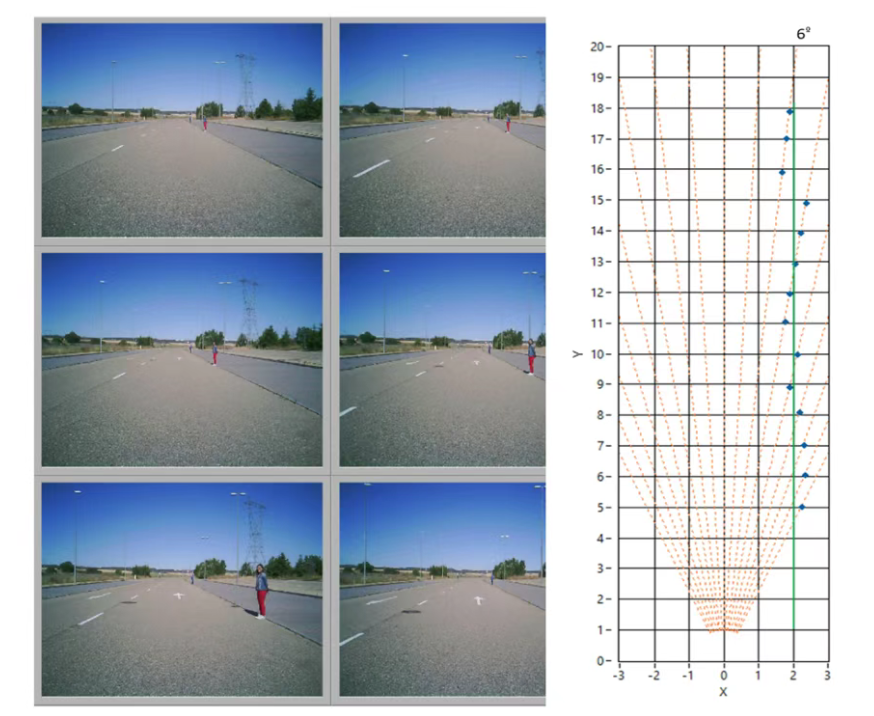
Within the Atom core, multiple subsystems — including peak detection, CFAR adaptive thresholding, and target discrimination — collaborate to identify pedestrians within 5–21 meters ahead.
When detection occurs, the system communicates with the Advanced Driver Assistance System (ADAS), triggering Automatic Emergency Braking (AEB) or speed adjustment mechanisms.
Field Testing
The University of Valencia conducted rigorous real-world tests on an urban dual-lane road (8 m wide, several hundred meters long).
The vehicle maintained a constant 30 km/h speed, while two stationary pedestrians were positioned 25 m apart. Across 200 test runs, the system achieved:
- Detection Probability (Pd): 0.91
- False Alarm Probability (Pfa): 0.011
Despite slight performance reductions due to engine and wind noise, the overall results confirm the system’s robust feasibility for real-world driving scenarios.
🔗 Reference:
Izquierdo, A., del Val, L., Villacorta, J. J. “Pedestrian detection using a MEMS acoustic array mounted on a moving vehicle.” Sensors & Actuators: A. Physical, Vol. 376, 2024, 115586.
(Read on ScienceDirect)
Future Directions
The research team plans to further enhance detection capabilities by:
- Increasing signal transmission power and bandwidth
- Applying statistical optimal beamforming algorithms
- Incorporating Kalman filter-based tracking and data association
These improvements will help achieve higher accuracy, fewer false alarms, and improved integration into intelligent transportation systems (ITS).
Smart MEMS Microphones: The Core Enabler
The success of this pedestrian detection system underscores the potential of Smart MEMS microphone arrays in acoustic imaging and ADAS applications.
At Wuxi Silicon Source Technology Co., Ltd., our Smart MEMS Microphone series offers:
- High sensitivity and low noise floor
- Excellent phase matching for array applications
- Compact SMD package for automotive integration
- Wide operating temperature range
These features make SISTC’s Smart MEMS microphones ideal for autonomous driving, industrial acoustics, and environmental sensing.
Conclusion
This innovation marks a significant step toward acoustic perception for safer mobility.
As visual sensors face limitations under challenging weather or lighting, MEMS microphone arrays — with their high precision, adaptability, and low cost — are emerging as a complementary sensing technology for future smart vehicles.
🔗 Explore more from SISTC: